Previous: Baseline Model
#Import necessary packages
import numpy as np
import matplotlib.pyplot as plt
import tensorflow as tf
from itertools import product
from tensorflow.python.keras import layers
from tensorflow.python.keras import optimizers
from tensorflow.python.keras import losses
from tensorflow.python.keras import models
from tensorflow.keras.preprocessing.image import ImageDataGenerator
from scipy.ndimage.interpolation import map_coordinates
from scipy.ndimage.filters import gaussian_filter
#Import data files
fullsize_training_inputs = np.load('training_inputs.npy')
fullsize_training_ground_truth = np.load('training_ground_truth.npy')
fullsize_testing_inputs = np.load('testing_inputs.npy')
fullsize_testing_ground_truth = np.load('testing_ground_truth.npy')
#Dice the tensor into smaller, square images
def stack_tensor(tensor,num_stack_H,num_stack_W,rotate=False):
'''
divides tensor of size (N,H,W,C) into more instances of smaller images (N*n^2,H/n,W/n,C)
tensor: A four dimensional tensor object or numpy array
num_stack: number of times to divide width and height
'''
#unpack values
N, H, W, C = tensor.shape
new_N = N*(num_stack_H*num_stack_W)
new_H = H//num_stack_H
new_W = W//num_stack_W
image_segments = product(range(num_stack_H), range(num_stack_W))
stacked_tensor = np.empty((new_N,new_H,new_W,C))
if rotate == True:
stacked_tensor = np.empty((new_N,new_W,new_H,C))
tensor = np.swapaxes(tensor,1,2)
image_segments = product(range(num_stack_W), range(num_stack_H))
new_H, new_W = new_W, new_H
new_n=0
for r, c in image_segments:
for n in range(N):
stacked_tensor[new_n,:,:,:] = tensor[n, r*new_H:(r+1)*new_H,c*new_W:(c+1)*new_W,:]
new_n += 1
return stacked_tensor
#subtract a mean image to center the data
def preprocess_tensor(tensor):
'''
Applies common pre-processing transformations and returns the necessary constants
to apply the same transforms to validation and test data
'''
tensor_mean = np.mean(tensor,axis=0,keepdims=True)
preprocessed_tensor = tensor - tensor_mean
return preprocessed_tensor, tensor_mean
#Apply dicing function and delete fullsize images to save memory
training_inputs = stack_tensor(fullsize_training_inputs,3,4)/255
training_ground_truth = stack_tensor(fullsize_training_ground_truth,3,4)/255
testing_inputs = stack_tensor(fullsize_testing_inputs,3,4)/255
testing_ground_truth = stack_tensor(fullsize_testing_ground_truth,3,4)/255
input_shape = training_inputs.shape
del fullsize_training_inputs
del fullsize_training_ground_truth
del fullsize_testing_inputs
del fullsize_testing_ground_truth
seed = 0
alpha = 10
sigma = 10
global image_seed
image_seed = 0
#Define some additional transormations
def elastic_transform(image):
#alpha, sigma, random_state must be passed as global variables
random_state = np.random.RandomState(image_seed)
shape = image.shape
dx = gaussian_filter((random_state.rand(*shape[:2])*2 - 1), sigma, mode = "constant",cval = 0)*alpha
dy = gaussian_filter((random_state.rand(*shape[:2])*2 - 1), sigma, mode = "constant",cval = 0)*alpha
x,y = np.meshgrid(np.arange(int(shape[1])),np.arange(int(shape[0])))
indices = np.reshape(y+dy,(-1,1)), np.reshape(x+dx,(-1,1))
transformed_image = np.empty(shape)
for c in range(shape[2]):
mapped_image = map_coordinates(image[:,:,c],indices, order=1,mode='reflect')
transformed_image[:,:,c] = mapped_image.reshape((shape[0],shape[1]))
return transformed_image
def random_noise(image):
#add random_noise to the images
#seed must be passed as a global variable
random_state = np.random.RandomState(image_seed)
noise_mag = random_state.uniform(low=0.01,high=0.1)
noise_width = random_state.uniform(low = 0.01, high = 0.5)
noise = noise_mag*random_state.normal(scale=noise_width,
size=image.shape
)
transformed_image = image+noise
return transformed_image
def additional_image_transformations(image):
#randomly add noise and a deformation
image_seed = np.random.choice(10000)
random_state = np.random.RandomState(image_seed)
transformed_image = image
alpha = random_state.uniform(low=50,high=250)
sigma = random_state.uniform(low=10,high=20)
if random_state.choice(2) == 1:
transformed_image = random_noise(transformed_image)
if random_state.choice(2) == 1:
transformed_image = elastic_transform(transformed_image)
return transformed_image
def additional_mask_transformations(image):
#randomly add a deformation
random_state = np.random.RandomState(image_seed)
transformed_image = image
alpha = random_state.uniform(low=50,high=250)
sigma = random_state.uniform(low=10,high=20)
if random_state.choice(2) == 1:
pass
if random_state.choice(2) == 1:
transformed_image = elastic_transform(image)
return transformed_image
# we create two instances with the same arguments
mask_gen_args = {'rotation_range':90,
'width_shift_range':0.05,
'height_shift_range':0.05,
'zoom_range':0.1,
'fill_mode':'constant',
'cval':0,
'horizontal_flip':True,
'vertical_flip':True,
'preprocessing_function':additional_mask_transformations
}
image_gen_args = mask_gen_args.copy()
#image_gen_args['preprocessing_function'] = additional_image_transformations
def conv_block(input_tensor, num_filters):
encoder = layers.Conv2D(filters=num_filters,kernel_size=(3, 3),padding='same')(input_tensor)
encoder = layers.BatchNormalization()(encoder)
encoder = layers.Activation('relu')(encoder)
return encoder
def encoder_block(input_tensor, num_filters):
encoder = conv_block(input_tensor, num_filters)
encoder_pool = layers.MaxPooling2D(pool_size=(2, 2), strides=(2, 2))(encoder)
return encoder_pool, encoder
def decoder_block(input_tensor, concat_tensor, num_filters):
decoder = layers.Conv2DTranspose(filters=num_filters,kernel_size=(2, 2),strides=(2, 2),padding='same')(input_tensor)
decoder = layers.concatenate([concat_tensor, decoder], axis=-1)
decoder = layers.BatchNormalization()(decoder)
decoder = layers.Activation('relu')(decoder)
decoder = layers.Conv2D(filters=num_filters,kernel_size=(3, 3),padding='same')(decoder)
decoder = layers.BatchNormalization()(decoder)
decoder = layers.Activation('relu')(decoder)
return decoder
inputs = layers.Input(shape = training_inputs.shape[1:])
encoder0_pool, encoder0 = encoder_block(inputs, 32)
encoder1_pool, encoder1 = encoder_block(encoder0_pool, 64)
encoder2_pool, encoder2 = encoder_block(encoder1_pool, 128)
encoder3_pool, encoder3 = encoder_block(encoder2_pool, 256)
encoder4_pool, encoder4 = encoder_block(encoder3_pool, 512)
center = conv_block(encoder4_pool,1024)
decoder4 = decoder_block(center, encoder4, 512)
decoder3 = decoder_block(decoder4, encoder3, 256)
decoder2 = decoder_block(decoder3, encoder2, 128)
decoder1 = decoder_block(decoder2, encoder1, 64)
decoder0 = decoder_block(decoder1, encoder0, 32)
outputs = layers.Conv2D(1, (1, 1), activation='sigmoid')(decoder0)
model = models.Model(inputs=[inputs], outputs=[outputs])
model.summary()
==================================================================================================
Total params: 15,388,385
Trainable params: 15,378,401
Non-trainable params: 9,984
__________________________________________________________________________________________________
from tensorflow.keras.utils import plot_model
plot_model(model,to_file = 'model_plot.png',rankdir='TB')

def dice_coeff(y_true, y_pred):
smooth = 1.
# Flatten
y_true_f = tf.reshape(y_true, [-1])
y_pred_f = tf.reshape(y_pred, [-1])
intersection = tf.reduce_sum(y_true_f * y_pred_f)
score = (2. * intersection) / (tf.reduce_sum(y_true_f) + tf.reduce_sum(y_pred_f) + smooth)
return score
def dice_loss(y_true, y_pred):
loss = 1 - dice_coeff(y_true, y_pred)
return loss
def log_dice_loss(y_true, y_pred):
loss = tf.log(1 - dice_coeff(y_true, y_pred))
return loss
def bce_loss(y_true,y_pred):
bce_loss = losses.binary_crossentropy(y_true,y_pred)
return bce_loss
nonzero_inds = []
for i in range(training_ground_truth.shape[0]):
if training_ground_truth[i,:].sum() != 0:
nonzero_inds.append(i)
cleaned_inputs = training_inputs[nonzero_inds,:,:,:]
cleaned_ground_truth = training_ground_truth[nonzero_inds,:,:,:]
cleaned_inputs, train_mean = preprocess_tensor(cleaned_inputs)
val_inds = np.random.choice(testing_inputs.shape[0],100)
validation_inputs = testing_inputs[val_inds,:]
validation_ground_truth = testing_ground_truth[val_inds,:]
validation_inputs -= train_mean
batch_size = 15
seed = 135
#Instantiate Data Generators
image_datagen = ImageDataGenerator(**image_gen_args)
mask_datagen = ImageDataGenerator(**mask_gen_args)
train_image_generator = image_datagen.flow(
cleaned_inputs,
batch_size=batch_size,
seed=seed)
train_mask_generator = mask_datagen.flow(
cleaned_ground_truth,
batch_size=batch_size,
seed=seed)
train_generator = (pair for pair in zip(train_image_generator,train_mask_generator))
#Initiate Adam optimizer with default values
opt = optimizers.Adam(lr=1e-6,beta_1=0.8,beta_2=0.99)
#Compile model
model.compile(optimizer=opt,
loss=log_dice_loss,
metrics=[dice_coeff])
model.load_weights('tmp/weights_final.hdf5')
#Some parameters
epochs = 60
#Define a model callback
save_model_path = 'tmp/weights_final.hdf5'
cp = tf.keras.callbacks.ModelCheckpoint(filepath=save_model_path,
monitor='val_loss',
save_best_only=True,
verbose=1
)
'''
No augmentation
default lr 1e-3
batch_size = 15
loss function bce
normalization_method=batch
model_depth = 5 maxpool layers,
filter_size = 3x3
01: True 5x5 filter
02: Effective 5x5 filter
03: 16 filter layer at beginning end
04: 2048 filter layer at center
05: Layer normalization
06: No normalization
07: Log Dice loss
08: Batch size 10
09: Batch size 5
10: eps 1e-4
11: eps 1e-1
12: lr 1e-1
13: lr 1e-5
14: Batch size = 20
15: Batch size = 20
16: Deeper network
17: Deeper network, Batch size 10, log dice loss, lr=1e-3,eps=1e-4
'''
#Fit the model
history3 = model.fit_generator(train_generator,
epochs=epochs,
steps_per_epoch = cleaned_inputs.shape[0]//batch_size,
validation_data=(validation_inputs,validation_ground_truth),
shuffle=True,
callbacks=[cp],
initial_epoch = 50
)
Epoch 51/60
108/109 [============================>.] - ETA: 32s - loss: -2.7314 - dice_coeff: 0.9341
Epoch 00051: val_loss improved from inf to -2.60830, saving model to tmp/weights_final.hdf5
109/109 [==============================] - 3629s 33s/step - loss: -2.7312 - dice_coeff: 0.9341 - val_loss: -2.6083 - val_dice_coeff: 0.9245
Epoch 52/60
108/109 [============================>.] - ETA: 32s - loss: -2.7245 - dice_coeff: 0.9332
Epoch 00052: val_loss improved from -2.60830 to -2.60953, saving model to tmp/weights_final.hdf5
109/109 [==============================] - 3532s 32s/step - loss: -2.7253 - dice_coeff: 0.9333 - val_loss: -2.6095 - val_dice_coeff: 0.9245
Epoch 53/60
108/109 [============================>.] - ETA: 32s - loss: -2.7228 - dice_coeff: 0.9334
Epoch 00053: val_loss did not improve from -2.60953
109/109 [==============================] - 3573s 33s/step - loss: -2.7230 - dice_coeff: 0.9334 - val_loss: -2.6084 - val_dice_coeff: 0.9245
Epoch 54/60
108/109 [============================>.] - ETA: 32s - loss: -2.7363 - dice_coeff: 0.9336
Epoch 00054: val_loss did not improve from -2.60953
109/109 [==============================] - 3592s 33s/step - loss: -2.7353 - dice_coeff: 0.9336 - val_loss: -2.6085 - val_dice_coeff: 0.9245
Epoch 55/60
108/109 [============================>.] - ETA: 32s - loss: -2.7240 - dice_coeff: 0.9336
Epoch 00055: val_loss improved from -2.60953 to -2.61043, saving model to tmp/weights_final.hdf5
109/109 [==============================] - 3599s 33s/step - loss: -2.7214 - dice_coeff: 0.9334 - val_loss: -2.6104 - val_dice_coeff: 0.9246
Epoch 56/60
108/109 [============================>.] - ETA: 32s - loss: -2.7385 - dice_coeff: 0.9344
Epoch 00056: val_loss did not improve from -2.61043
109/109 [==============================] - 3558s 33s/step - loss: -2.7401 - dice_coeff: 0.9345 - val_loss: -2.6086 - val_dice_coeff: 0.9245
Epoch 57/60
108/109 [============================>.] - ETA: 32s - loss: -2.7446 - dice_coeff: 0.9351
Epoch 00057: val_loss did not improve from -2.61043
109/109 [==============================] - 3563s 33s/step - loss: -2.7421 - dice_coeff: 0.9349 - val_loss: -2.6073 - val_dice_coeff: 0.9244
Epoch 58/60
108/109 [============================>.] - ETA: 32s - loss: -2.7234 - dice_coeff: 0.9337
Epoch 00058: val_loss did not improve from -2.61043
109/109 [==============================] - 3575s 33s/step - loss: -2.7241 - dice_coeff: 0.9337 - val_loss: -2.6093 - val_dice_coeff: 0.9245
Epoch 59/60
108/109 [============================>.] - ETA: 32s - loss: -2.7493 - dice_coeff: 0.9349
Epoch 00059: val_loss improved from -2.61043 to -2.61064, saving model to tmp/weights_final.hdf5
109/109 [==============================] - 3592s 33s/step - loss: -2.7480 - dice_coeff: 0.9349 - val_loss: -2.6106 - val_dice_coeff: 0.9246
Epoch 60/60
108/109 [============================>.] - ETA: 32s - loss: -2.6988 - dice_coeff: 0.9316
Epoch 00060: val_loss did not improve from -2.61064
109/109 [==============================] - 3529s 32s/step - loss: -2.7011 - dice_coeff: 0.9318 - val_loss: -2.6088 - val_dice_coeff: 0.9245
tf.keras.models.save_model(model,'tmp/model_final.hdf5')
#Load best model
model.load_weights('tmp/weights_final.hdf5')
# Score trained model.
possible_test_inds = [i for i in range(testing_inputs.shape[0]) if i not in val_inds]
test_inds = np.random.choice(possible_test_inds,100,replace=False)
scores = model.evaluate(testing_inputs[test_inds,:,:,:] - train_mean,
testing_ground_truth[test_inds,:,:,:],
verbose=1)
print('Test loss:', scores)
100/100 [==============================] - 14s 137ms/sample - loss: -2.3179 - dice_coeff: 0.9121
Test loss: [-2.3179107666015626, 0.9120971]
index = 80
_,H,W,_ = testing_inputs.shape
image = testing_inputs[test_inds[index],:,:,0]
predict_mask = np.zeros(shape=(H,W,4))
test_mask = np.zeros(shape=(H,W,4))
oops_mask = np.zeros(shape=(H,W,4))
predict_mask[:,:,0] = model.predict(testing_inputs[test_inds,:,:,:]-train_mean)[index][:,:,0]
predict_mask[:,:,3] = 0.2*(predict_mask[:,:,0]>0.)
test_mask[:,:,0] = testing_ground_truth[test_inds[index],:,:,0]
test_mask[test_mask>1] = 1
test_mask[:,:,3] = 0.2*(test_mask[:,:,0]>0.)
oops_mask[:,:,0] = 0.5*(predict_mask[:,:,0] - test_mask[:,:,0])+0.5
oops_mask[:,:,3] = 0.4*((oops_mask[:,:,0]>0.51))+0.4*(oops_mask[:,:,0]<0.49)
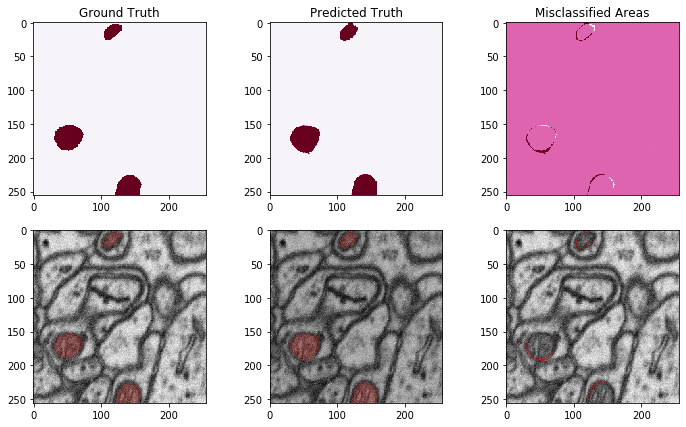
fig = plt.figure(figsize=[12,7])
ax1 = plt.subplot(2,3,1)
ax1.imshow(test_mask[:,:,0],cmap='PuRd')
ax1.set_title('Ground Truth')
ax2 = plt.subplot(2,3,2)
ax2.imshow(predict_mask[:,:,0],cmap='PuRd')
ax2.set_title('Predicted Truth')
ax3 = plt.subplot(2,3,3)
ax3.imshow(oops_mask[:,:,0],cmap='PuRd')
ax3.set_title('Misclassified Areas')
ax4 = plt.subplot(2,3,4)
ax4.imshow(image,cmap = 'gray',label='real_image')
ax4.imshow(test_mask,cmap='Reds')
ax5 = plt.subplot(2,3,5)
ax5.imshow(image,cmap = 'gray',label='predicted_image')
ax5.imshow(predict_mask,cmap='Reds')
ax6 = plt.subplot(2,3,6)
ax6.imshow(image,cmap = 'gray',label='mistakes_image')
ax6.imshow(oops_mask,cmap='PuRd')
plt.show()
def predict_on_fullsize_image(model,image,stride,width=256,train_mean = 0):
H, W, Ch = image.shape
R = (H - width)//stride+1
C = (W - width)//stride+1
N = R*C
predict_stack = np.empty(shape=(N,width,width,Ch))
image_segments = product(range(R), range(C))
n=0
for r, c in image_segments:
predict_stack[n,:,:,:] = image[r*stride:r*stride+width,c*stride:c*stride+width,:]
n += 1
predictions = model.predict(predict_stack - train_mean)
combined_predictions = np.zeros(shape = (H,W))
counts = np.zeros(shape = (H,W))
image_segments = product(range(R), range(C))
n=0
for r,c in image_segments:
combined_predictions[r*stride:r*stride+width,c*stride:c*stride+width] += predictions[n,:,:,0]
counts[r*stride:r*stride+width,c*stride:c*stride+width] += np.ones(shape = (width,width))
n += 1
predict_image = combined_predictions / counts
predict_image[counts == 0] = 0
return predict_image, counts
fullsize_testing_inputs = np.load('testing_inputs.npy')
fullsize_testing_ground_truth = np.load('testing_ground_truth.npy')
fullsize_ind = 0
predict_image,counts = predict_on_fullsize_image(model,fullsize_testing_inputs[fullsize_ind,:,:,:]/255,32,train_mean=train_mean)
_,H,W,_ = fullsize_testing_inputs.shape
image = fullsize_testing_inputs[fullsize_ind,:,:,0]
predict_mask = np.zeros(shape=(H,W,4))
test_mask = np.zeros(shape=(H,W,4))
oops_mask = np.zeros(shape=(H,W,4))
predict_mask[:,:,0] = predict_image > 0.5
predict_mask[:,:,3] = 0.2*(predict_image>0.)
test_mask[:,:,0] = fullsize_testing_ground_truth[fullsize_ind,:,:,0]/255
test_mask[:,:,3] = 0.2*(test_mask[:,:,0]>0.)
oops_mask[:,:,0] = 0.5*(predict_mask[:,:,0] - test_mask[:,:,0])+0.5
oops_mask[:,:,2] = oops_mask[:,:,0]<0.5
oops_mask[:,:,3] = 0.4*((oops_mask[:,:,0]>0.51))+0.4*(oops_mask[:,:,0]<0.49)
oops_mask[:,:,0] = oops_mask[:,:,0]>0.5
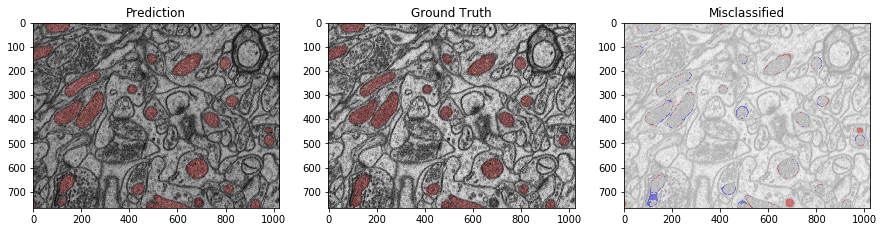
fig = plt.figure(figsize=[15,7])
ax1 = plt.subplot(1,3,1)
ax1.imshow(image,cmap='gray')
ax1.imshow(predict_mask,cmap='PuRd')
ax1.set_title('Prediction')
ax2 = plt.subplot(1,3,2)
ax2.imshow(image,cmap='gray')
ax2.imshow(test_mask,cmap='PuRd')
ax2.set_title('Ground Truth')
ax3 = plt.subplot(1,3,3)
ax3.imshow(image,cmap='gray',alpha=0.4)
ax3.imshow(oops_mask,cmap='PuRd')
ax3.set_title('Misclassified')
plt.show()